Prodcuts : Robot

ข้อมูลทั่วไป
หุ่นยนต์ ANDI-III เป็นผลิตภัณฑ์ที่ได้รับการจดสิทธิบัตร ของ บริษัท DALU Robotech Technology (Beijing) เป็นแพลตฟอร์มหุ่นยนต์บริการทั่วไปที่ปรับแต่งให้เหมาะสมกับความต้องการใช้งานได้เป็นอย่างดีมีโครงสร้างที่จุดศูนย์ถ่วงต่ำทำให้เคลื่อนที่ได้อย่างเสถียร สามารถเคลื่อนที่ได้แม้ทางที่ขรุขระ มีส่วนคอที่ปรับขึ้นลงได้เพื่อทัศนวิสัยที่ดี สามารถควบคุมสั่งการและใช้งานได้หลากหลาย
Videos:

ส่วนหัว
กล้องความละเอียดสูงทำงานร่วมกับกล้องเทเลโฟโต้บนตัวกล้องทำให้ เห็นทุกสิ่งตามเส้นทางที่ผ่าน และ สามารถอัพเกรดให้หมุนแบบ 360° ได้ตามความต้องการของลูกค้า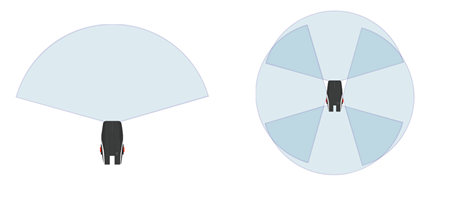

ส่วนคอ
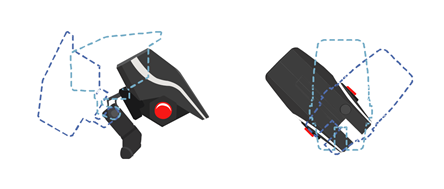
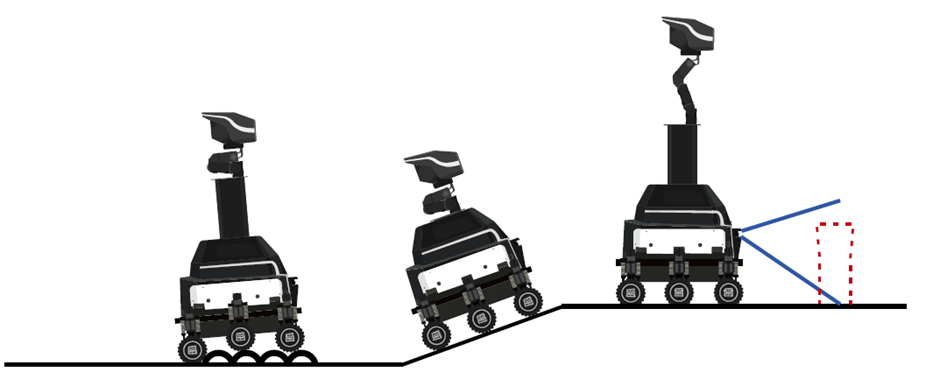
คอของหุ่นยนต์สามารถปรับขึ้นลงได้ ระหว่าง 115 ซม. ถึง 155 ซม. เหมาะสำหรับการตรวจสอบและเฝ้าระวัง

การปรับระดับความสูงให้เหมาะสมลักษณะงานที่ใช้ เช่น ปรับคอลงให้ต่ำสุดในขณะเคลื่อนที่เร็วเพื่อเสถียรภาพของการเคลื่อน และ ปรับให้คอให้ขึ้นสูงสุดเพื่อทัศนวิสัยที่ดีที่สุด ขณะใช้กล้องตรวจสอบเฝ้าระวัง

โครงช่วงล่าง : ช่วงล่างหกล้อ. กล้าหาญสำหรับภูมิประเทศ
แชสซีเคลื่อนที่แบบมีล้อ (จดสิทธิบัตร) ซึ่งเป็นการออกแบบชั้นนำในโลกของวิทยาการหุ่นยนต์ ใช้ระบบขับเคลื่อนหกล้อหกล้อ พวงมาลัยอิสระ, ระบบกันสะเทือนแบบแอคทีฟอิสระ, โครงสร้าง ด้วยโหมดการควบคุมที่เป็นเอกลักษณ์และยืดหยุ่น มันสามารถเคลื่อนที่ได้รอบทิศทาง ด้วยประสิทธิภาพการส่งผ่านที่ยอดเยี่ยม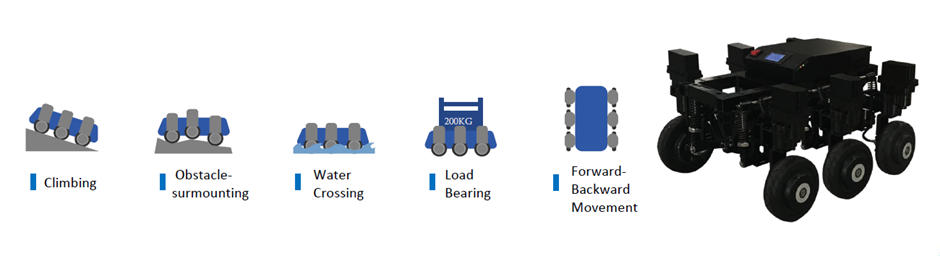
ระบบลาดตระเวนอัจฉริยะ
ตระเวนอัตโนมัติเต็มรูปแบบ : ผ่านเส้นทางลาดตระเวนตามแผนทางวิทยาศาสตร์ตลอด 24 ชั่วโมงอย่างต่อเนื่อง การลาดตระเวนสามารถทำได้โดยไม่มีจุดบอดใด ๆ ทำให้งานดีขึ้นมาก ประสิทธิภาพและลดภาระของพนักงานและนายจ้าง หุ่นยนต์ในรัฐสายตรวจสามารถเดินทางด้วยความเร็วที่กำหนดของเส้นทางที่กำหนด และรักษาระดับความตื่นตัวในระดับสูงในระหว่างกระบวนการเดินทาง และทุกสามารถตรวจพบข้อมูลที่ผิดปกติได้ตลอดเวลาระบบชาร์จอัตโนมัติ
ระบบชาร์จอัตโนมัติอัจฉริยะอัตโนมัติมีโหมดการชาร์จสองโหมด Plug & Play (PnP) กับแท่นชาร์จ หรือจะชาร์จแบบไร้สายก็ได้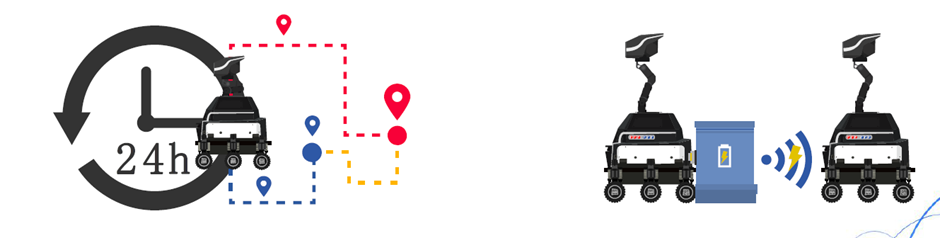



ระบบควบคุม
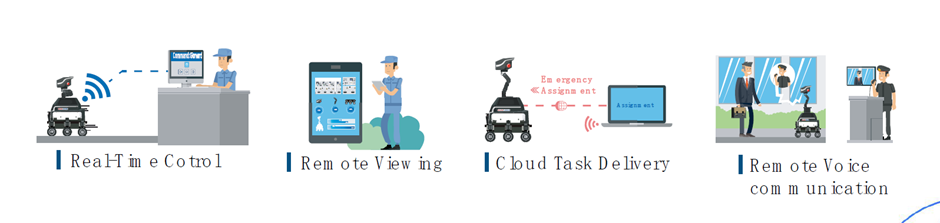
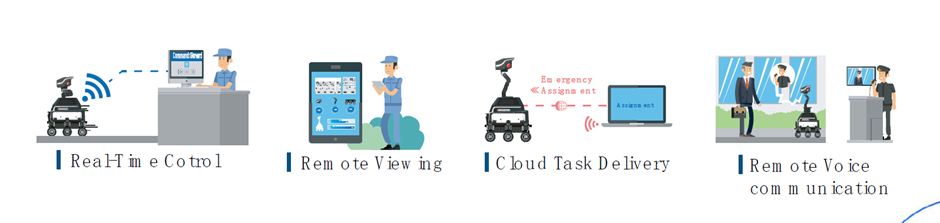
ปฏิบัติการอัจฉริยะ การตอบสนองอย่างรวดเร็ว ระบบควบคุมอัจฉริยะสามารถให้การสลับตามเวลาจริงไปยังการควบคุมแบบแมนนวล การดูสถานะหุ่นยนต์จากระยะไกลการส่งมอบงานบนคลาวด์ การสื่อสารด้วยเสียงจากระยะไกลและฟังก์ชันอื่น ๆ ทำให้การควบคุมหุ่นยนต์ การตรวจสอบความปลอดภัย และการส่งมอบงานสะดวกยิ่งขึ้น



Parameter Table
| COMPONENT | NUMBER | DETAILS |
|---|---|---|
| RL-C1 All Terrain Robot Chassis | 1 | Six wheels, ALL-wheel-drive, inde -pendent steering, independent suspension structure Bearing weight capacity:200kg Obstacle crossing ability:10cm Climbing ability:30 degrees Wade:10cm Wind resistance:level 8 Maximum driving speed: 6KM/H factory limit |
RL-C1 All Terrain Robot Chassis |
1 |
Six wheels, ALL-wheel-drive, inde -pendent steering, independent suspension structure Bearing weight capacity:200kg Obstacle crossing ability:10cm Climbing ability:30 degrees Wade:10cm Wind resistance:level 8 Maximum driving speed: 6KM/H factory limit
|
BODY |
1 |
Adjustable height 720*660*(1150-1550)mm 115-155cm the total weight is 80kg
|
NECK |
1 |
3 collapsible neck |
COMPUTER |
1 |
CPU:I7 6600u 8GRAM Hard disk:256GB solide system:ubuntu 16.04/ROS-K
|
Independent Craphics |
1 |
GPU accelerated computing |
Stereo Camera |
1 |
RGB Resolution:up to 1920*1080 Depth Resolution:up to 1280*720 |
LIDAR |
1 |
Measuring range 40m |
Thermal Camera |
1 |
384*288 |
Stellarcamera |
1 |
FOV 150°, 1080p |
Telephoto Camera |
1 |
Focal distance:16mm,1080p |
Flash riot lights |
1 |
|
MICROPHONE |
1 |
|
STEREO |
1 |
A Couple |
Ultrasonic Radar |
10 |
2m,FOV 70° |
Temperature and Humidity Sensor |
1 |
|
Advanced Satellite Navigation Module |
1 |
GPS |
High Precision IMU Module |
2 |
|
35Ah48v Lithium Battery+BMS |
1 |
|
Charging Pile |
1 |
High power fast charging |
Automatic fire ejector system |
Optional |
|
Automatic capture net transmitter system |
Optional |
|
Other customer defined systems |
Customized |
|
Video and Data Link Cloud Platform |
1 |
Support for multi-to-multi Cloud video services
MDS composite data link |
AI system and visual management platform of inspection robot |
1 |
Including three channels of video monitoring; Slam navigation planning; Face recognition, body recognition functions (see ANDI robot product introduction for details) |
Secondary Development Interface |
1 |
Secondary development interface based on Linux system, including cruise setting, motion control, basic recognition, audio and video information, acquisition and control of various sensor signals,etc |